
Why GNSS for eMobility must balance precision, price, power and packaging

The Global Navigation Satellite System (GNSS) provides a well understood, widely deployed and accepted way to accurately determine precise location. It therefore underpins navigation, tracking and tracing of goods and assets and, with billions of GNSS devices already deployed, it has become pervasive. However, GNSS applications are not one-size-fits-all and organizations are challenged to find and deploy suitable solutions that meet the constraints of their applications.
In eMobility, which this paper focuses on, ride-sharing providers have to carefully balance accuracy, cost, the power demand and the dimensional footprint of a GNSS module to ensure they select the optimum solution. Often, GNSS alone is not enough to pinpoint the location of small eMobility vehicles such as eScooters so eMobility organizations typically augment GNSS with additional sensors and algorithms.
eMobility
eMobility encompasses electric cars and trucks and public transport in addition to ride-sharing and hailing services such as those from Uber and Lyft plus micromobility solutions such as eBikes, eScooters and eSkateboards from companies like Bird, Lime and Didi, which are also offered by Uber and Lyft. In addition, new vehicle types such as last mile delivery robots are facing the same sorts of challenges as the micromobility market.
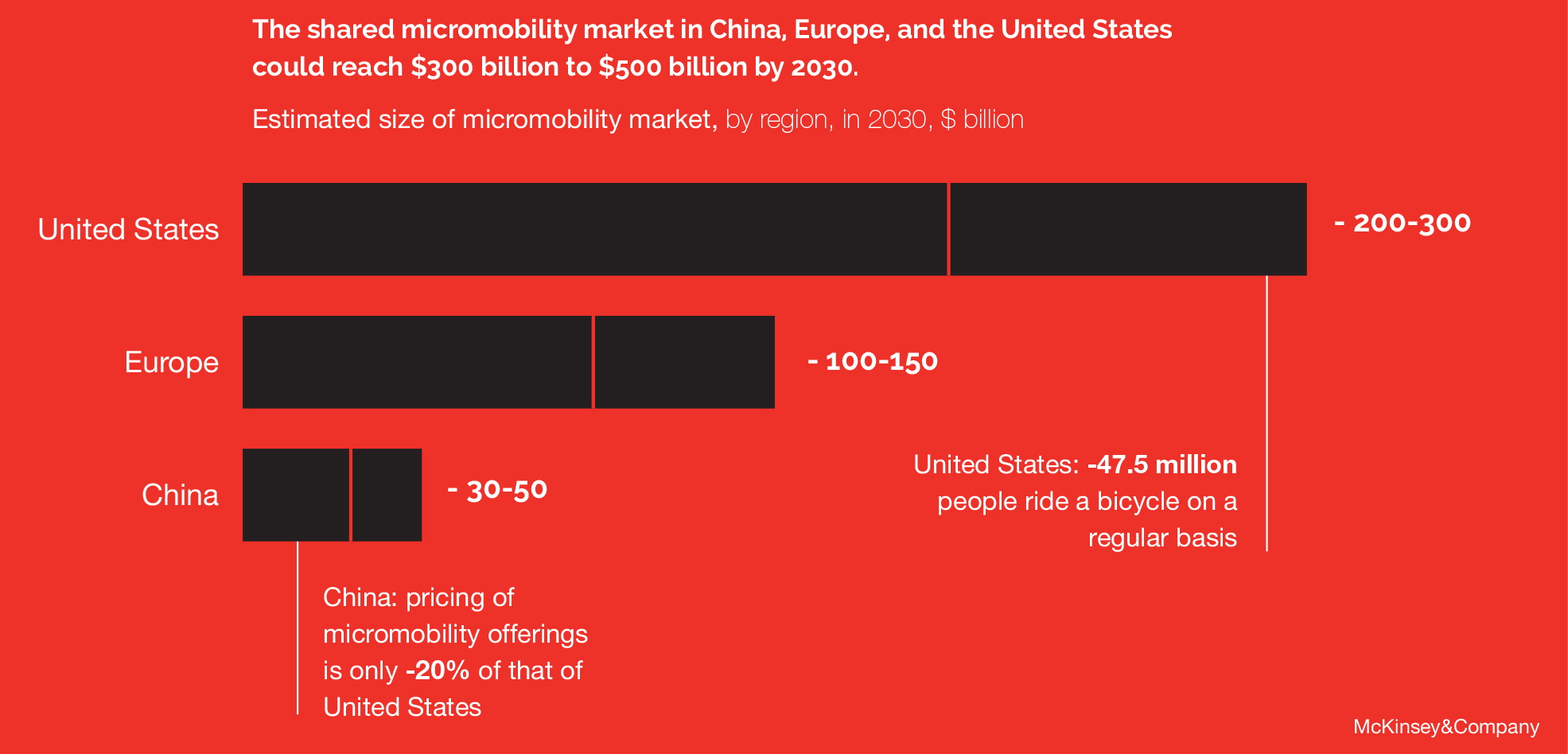
Consultancy firm McKinsey & Company reports that stakeholders have invested more than US$5.7 billion in micromobility start-ups since 2015, with more than 85% targeting China1. The firm predicts enormous uptake for these services, see Figure 1, as users recognize micromobility is faster than car-based trips and they enjoy the freedom of travelling in the fresh air.
GNSS challenges in eMobility
All services succeed or fail based on the customer experience they provide. This starts right from the first interaction so eMobility’s first challenge is to make the vehicle easy to find. Ride-sharing providers have demonstrated this can be convenient and simple but cars are larger devices and can accommodate more expensive, larger form factor GNSS capabilities than eScooters, that typically cost $400, for example. The smaller size of eBikes and eScooters further hinders users’ ability to actually locate the bike in the first place. They can be easily hidden between parked cars, behind trees or obscured by street furniture.
This lack of a clear view of satellites, caused by deep urban canyons, bad weather or parking garages makes it very challenging for any GNSS module to provide an accurate position. This is compounded by multipath effects which are prevalent in deep urban canyons.
The challenge of locating devices also affects service providers. If ride-sharing providers can’t find their vehicles, they can’t maintain them, charge batteries and relocate them to areas of greatest demand. This costs service providers in wasted worker time as well increased downtime of their vehicles.
Regulation is the next big hurdle. Uptake of eScooters and eBikes is growing rapidly and this is causing concern for city authorities who are looking to restrict usage on sidewalks.
Sidewalk restriction is a significant challenge for eMobility because of the very limited demarcation between roads and sidewalks. eScooter providers are challenged in terms of how they will handle this.
While they have the capability to sound alarms or even turn the motor off and lock the vehicle, false alarms will impact negatively on the user experience. Precision is therefore vital as sidewalk restriction is likely to become a regulatory requirement. The role of GNSS augmented by additional positioning technologies will become of increasing importance.
A more established challenge is geofencing to prevent eScooters vehicles from entering unauthorized areas. Some cities have approved the use of eScooters while others have not so, when an eScooter reaches the city limit, it needs to be stopped from entering the neighboring city where it is banned. This is also an issue that affects specific areas of a city.
In Los Angeles, for example, eScooters are not allowed to be ridden on Santa Monica Pier but people do it all the time. The city wants to restrict this so mobility providers have to decide where to start the technologically simple geofence of the pier.

The more satellites that an eScooter can see, the better the GNSS solution’s performance. Access to a good GNSS signal from multiple constellations of satellites, in addition to increased channel count is a must.
Mike Horton from HYFIX, a provider of positioning solutions to the eMobility market, has experienced all the challenges. “My own personal experience with eBikes reflects exactly the problem customers in the market have articulated, which is finding the bike,” he says. “The location reported in the app is often ambiguous and incorrect so the bike can’t be found easily.”
“Municipalities are now looking at ways to impose restrictions on where people can ride these vehicles,” he adds. “It will be vital to accurately alert users to approved and non- approved areas. Getting this wrong will be intrusive and ultimately could cause problems with authorities. Perhaps the biggest challenge is the nature of these vehicles. They are ridden in all kinds of difficult conditions next to buildings and under bridges and the GNSS antenna is very small and the human body can
get in its way. Vibration will also negatively affect GNSS performance on a typical scooter. I’d estimate an eScooter or eBike can only connect to 50-60% of satellites that a car in the same location could connect to.”
The solution for eMobility
In perfect conditions, when the sky is clear and there are no obstructions in the way, GNSS can tell users exactly where an eScooter is. However, perfect conditions seldom exist and micromobility vehicles therefore rely on additional methods to augment GNSS performance.
Dead reckoning solves many of the issues by combining wheel speed and inertial measurement unit (IMU) data – typically accelerometer and gyroscopic information -with GNSS. The position accuracy can be affected
by issues such as changes in tire pressure, road vibration and atmospheric differences that all can affect the performance of the dead reckoning engine when GNSS is challenged.
In eMobility, dead reckoning is ideally suited and provides vast improvements to positioning in deep urban canyons such as those in the financial district of San Francisco. In the drive test data in Figure 2 you can clearly see the improvement over the standalone L1 + L5
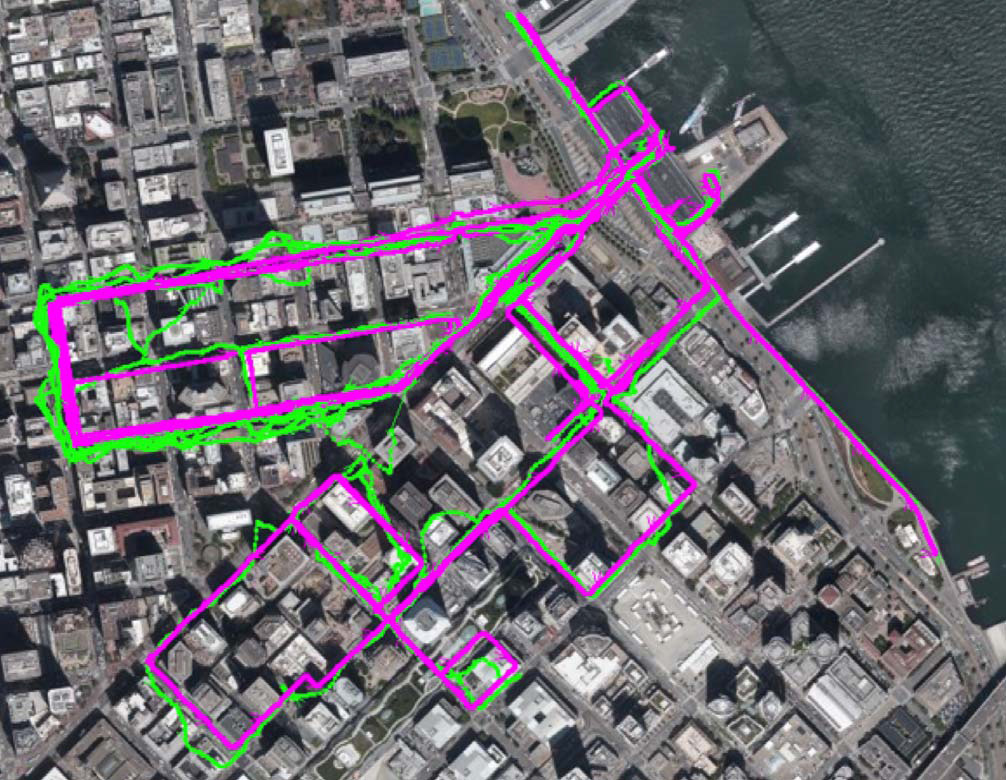
GNSS in green and the purple of L1 + L5 GNSS with DR, which is offering a 10x improvement in location accuracy.
The LC79D GNSS module

The LC79D is a L1/L5 dual band, multi- constellation GNSS receiver that offers an ultra- low form factor with dimensions of 10.1mm ×
9.7mm ×2.4mm, making it ideal for space- constrained designs such as eMobility vehicles. The LC79D’s best-in-class pricepoint, performance and low power consumption makes it a perfect and unique solution.
It can track L1 and L5 bands for satellite systems including GPS, Galileo and QZSS. On the L1 band, the LC79D can track the GLONASS and Beidou satellite systems and the module tracks the IRNSS system in the L5 band. Providing L1/L5 capability offers huge diversity and connection choice in even the most unfriendly locations.
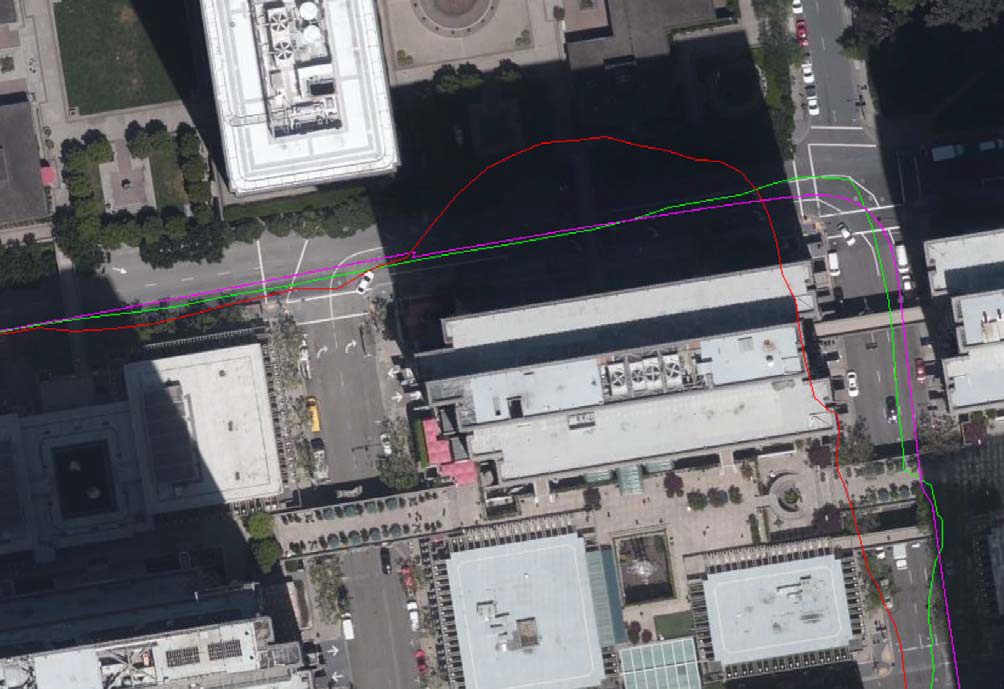
In contrast with L1-only GNSS modules, the LC79D adds the L5 band which greatly increases the number of satellites available, improves position accuracy and helps multipath challenge mitigation. Figure 3 compares the tracking performance with L1-only in red, L1 and L5 in green and L1 and L5 plus dead reckoning in purple so you can see the advantages.
“You need very high quality components to achieve accuracy and the LC79D GNSS module from Quectel with the dead reckoning software from HYFIX works amazingly well,” says Horton. “We can track for 10-15 minutes through very difficult GNSS conduits through cities and maintain sub-10 meter accuracy, it’s the perfect solution.”
Of further value to eMobility providers, the GNSS chipset, based on 28nm process technology, is coupled with an advanced low- power management solution that enables low- power operation and positioning determination. This makes the module well-suited for the power-sensitive and battery-powered systems used in eMobility.
Conclusion
The LC79D enables the eMobility industry, especially those engaged in micromobility, to harness the fusion of data from different sensors in a very small footprint at very low incremental cost with unparalleled accuracy. The LC79D is in production and samples and development kits are available now, uniquely offer both L1 and L5 capability and bridge the gap between basic GPS modules and very expensive high-end GNSS systems that are both cost-prohibitive and too power- hungry for use in eMobility.
“I’m confident this is the smallest, cheapest and best- performing solution at this level,” concludes Horton. “I think it’s a great little engine that offers a lot of benefits and is highly versatile.”

To learn more about Quectel’s GNSS portfolio please go to our website and visit GNSS pages.
To order samples and developer kits please contact your local sales departments: [email protected]